Different Ways on How to Make the Robot Turn
Here are a few different ways to make your robot turn.
1 way is to use the gyro sensor but it can be picky to learn about it's pros and cons go to the pros and cons sensor section.

See that arrow on the block? That is the other way of turning the robot. Not recommend it . If you use it, it takes trial and error.
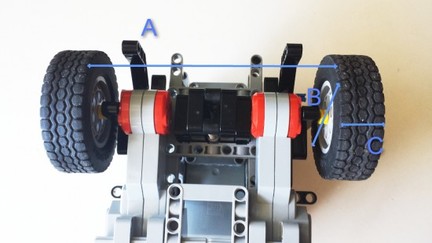
You an make one wheel go forward a certain amount of degrees and one wheel not move at to turn the robot. Not recommended. We used this and it needs lots of trial and error.
Turning one wheel forward and one wheel backward makes the robot spin in place. For move tank- set the power of one motor the opposite of the other motor. For move steering- drag the steering slider all the way to the right or left.
